Control de la máquina de medición de visión general de 4 ejes
Introducción
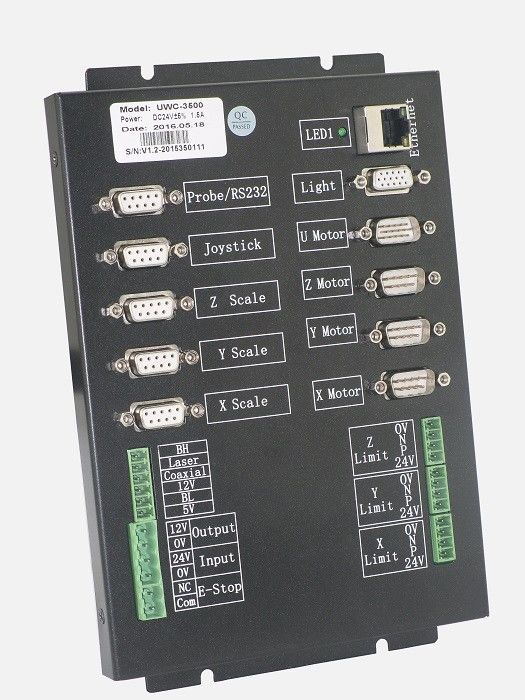
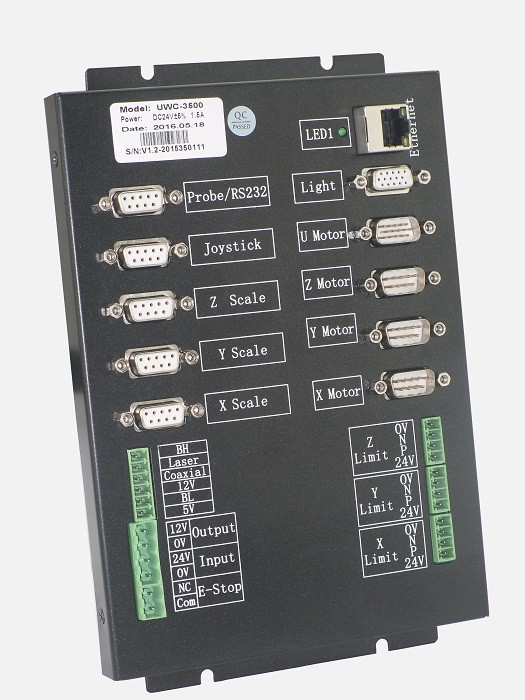
UWC 3500 es un controlador general de circuito cerrado completo de 4 ejes, utilizado en máquinas de medición de visión y máquinas de medición de visión compuesta, o sistemas de medición de automatización.Con retroalimentación de posición de circuito cerrado de la escala lineal o del codificador del motor, el UWC3500 es capaz de lograr una alta precisión.
Características:
1. estructura avanzada de la máquina superior e inferior, CPU+FPGA de alto rendimiento
2Comunicación: Interfaz Ethernet, el tiempo de ejecución de una sola función API es inferior a 0,45 ms.
3. Modo de control Dirección+Pulso, capaz de controlar los motores paso a paso, servo CA, servo lineal o DDM, etc.
4. Control de movimiento completo de bucle cerrado, localización de alta precisión que es rápida, precisa y estable. Algorismo de control de bucle cerrado avanzado y muy pocos parámetros PID, aseguran un giro fácil para los usuarios.
5. S tipo de curva de velocidad planeado, la relación de sección S en el proceso de desaceleración se puede establecer.
6Estrategia de localización:
Control de circuito abierto de impulso + dirección.
Control de circuito cerrado de retroalimentación de la escala/posición del codificador lineal, algoritmo mejorado PID+VFF, eliminando el problema de desplazamiento cero.
7Modo de movimiento:
Punto a punto, modo JOG, modo de orientación que es fácil de usar y flexible, interpolación lineal de 2 o 3 ejes, interpolación de arco horizontal, sonda táctil y modo joystick.
8- Política de seguridad:
Función de ajuste automático del giro de la máquina, fijando automáticamente la lógica y dirección límite, los parámetros de los motores y la dirección de retroalimentación lineal,garantizar la eliminación del error de movimiento de retroalimentación.
Cuando el eje se mueve cerca del límite hay una desaceleración avanzada, y antes de la orientación hay una restricción forzada de la velocidad de movimiento.
Se admite el límite de software.
9. La función API utiliza la encapsulación frente al objeto, que ofrece una programación fácil. La mayoría de los parámetros son establecidos por el software de depuración.
10Alta integración, alto rendimiento, producción y mantenimiento estables y fáciles.
11El UWC-3500 está utilizando tecnología de producción SMT, garantizando estabilidad y fiabilidad.
12Con una gran flexibilidad, el UWC3500 se ajusta al equipo no estándar y también se puede personalizar la función.
13. El UWC3500 es compatible con la función de actualización de firmware en línea, los usuarios no tienen que quitar el controlador de la máquina, fácil de actualizar y ampliar la función,acortar el ciclo de desarrollo y giro del equipo.
14. Módulo externo UWC348 IO, máximo para 26 en 26 fuera.
15. Función de coincidencia de posición comparativa, que se puede coincidir con precisión, también los usuarios pueden establecer el rango de disparador de coincidencia, la salida de disparador se puede conectar a la cámara o sensor láser.
16Función de control de la fuente de luz de estrobollas operativo y función de disparador de coincidencia de posición CCD.
17. Poderoso software de depuración incluido, fácil operación, fácil para los usuarios girar la máquina.
Parámetros
| Punto de trabajo |
- ¿Qué es eso?
|
Típico
|
- ¿Qué quieres decir?
|
Unidad
|
| Tiempo de funcionamiento de la API |
0.425
|
0.43
|
0.45
|
ms
|
| Voltagem de potencia de entrada |
22.5
|
24
|
26
|
VDC
|
| Válvula de salida de potencia auxiliar de 12 V |
11.76
|
12.05
|
12.24
|
VDC
|
| Corriente de salida de potencia auxiliar de 12 V |
0
|
2.0
|
2.5
|
A. No
|
| Válvula de salida de potencia de 5 V |
5.1
|
5.2
|
5.25
|
VDC
|
| Corriente de salida de potencia de 5 V |
0
|
1.8
|
2.0
|
A. No
|
| Interfaz del motor con capacidad de carga de 24 V |
0
|
3.0
|
4.0
|
A. No
|
| Frecuencia del pulso de dirección |
-
|
-
|
6.5
|
frecuencia de radio
|
| Resolución de frecuencia |
0.006
|
-
|
-
|
HZ
|
| Rango de conteo de escala lineal |
- 2147483648 - ¿ Qué quieres decir?
|
-
|
2147483647
|
Las CNT
|
| Rango de recuento de pulsos de dirección |
- 2147483648 - ¿ Qué quieres decir?
|
-
|
2147483647
|
Las CNT
|
| Nivel de ajuste de la velocidad |
-
|
-
|
1,000,000,000
|
DDS de 32 bits
|
| Resolución de escala lineal soportada |
- No hay nada.01
|
-
|
10000
|
¿ Qué es eso?
|
| Frecuencia de salida de la señal a escala lineal |
-
|
-
|
6.5
|
frecuencia de radio
|
| Entrada/salida general del controlador |
-
|
-
|
-
|
Terminal de servicio
|
| Interfaz de comunicación RS232 de alta velocidad |
-
|
2
|
-
|
Terminal de servicio
|
| Entrada / salida de entrada / salida de entrada externa (Utilizando una interfaz de comunicación RS232) |
-
|
24 horas al día
|
-
|
Terminal de servicio
|
| Corriente de salida por paso |
0.07
|
-
|
1.15
|
A (RMS)
|
| Subdivisión de conducción de paso |
16
|
16
|
16
|
|
Especificación
| - No, no es así. |
Especificación
|
UWC3500
|
| 1 |
Suministro de energía
|
Las emisiones de gases de efecto invernadero de los sistemas de combustión interna y de los sistemas de combustión interna se calcularán de acuerdo con el método de cálculo de las emisiones de gases de efecto invernadero.
|
| 2 |
Medición de la compatibilidad del software
|
Compatible con el V1.4
|
| 3 |
Dimensión
|
El valor de las emisiones de gases de efecto invernadero es el valor de las emisiones de gases de efecto invernadero.
|
| 4 |
Comunicación
|
USB o Ethernet aislados (opcional)
|
| 5 |
política de control de circuito cerrado
|
PID+VFF+ banda muerta
|
| 6 |
Frecuencia de actualización por servo
|
2.5KHz
|
| 7 |
Anti-choque mecánico, velocidad optimizada
|
Modo SMART
|
|
| 8 |
Eje de recuento del transductor lineal
|
3
|
|
| 9 |
Eje de control básico
|
4
|
|
| 10 |
Gastos del eje
|
Puede añadir 3 ejes de pulso+dirección
|
|
| 11 |
Modo de control del eje XYZ
|
Pulso + dirección RS422
|
|
| 12 |
Tipo de motores con eje XYZ (con motor externo)
|
Servo paso/cambio de corriente/servo lineal/servo CC con retroalimentación del codificador
|
|
| 13 |
Modo de control del eje U A
|
RS232 se conecta a la lente de zoom automático Pomeas
|
|
| 14 |
Modo de control del eje U B
|
Se incluye un controlador de paso de 2 fases, que soporta la lente de zoom automático con motores paso, se admiten límites individuales / dúo.
|
|
| 15 |
Planificación de la curva de velocidad
|
Tipo de escalera/S
|
|
| 16 |
Interpolación
|
Interpolación lineal de varios ejes, interpolación de arco de 2 ejes, interpolación de 3 ejes
|
| 17 |
Frecuencia de pulso máxima
|
5MHz
|
|
| 18 |
Resolución de la frecuencia de pulso
|
0.001Hz
|
|
| 19 |
Nivel de ajuste de la velocidad
|
1,000,000,000
|
|
| 20 |
Control de voltaje analógico
|
-
|
|
| 21 |
Frecuencia de recuento del transductor lineal
|
6MHz/ ((Fase A o B)
|
|
| 22 |
Definición de la señal del transductor lineal
|
R o S para opcional (R:12345, S:26789)
|
|
| 23 |
Aparatos de medición de sondas
|
Circuito de interfaz de la sonda táctil
|
|
| 24 |
Circuito de procesamiento de errores de la sonda
|
Disponible, reparación automática de la sonda no se dirige
|
|
| 25 |
Probe compatible
|
En el caso de la serie Renishaw/Tesa todas las sondas de contacto con el gatillo
|
|
| 26 |
Módulo de procesamiento de la sonda
|
Bloqueo de alta velocidad de la sonda, control del joystick punto táctil pausa automática y retroceso automático, modo de punto de detección automático
|
|
| 27 |
Tarjeta de recogida de señales del joystick incrustada
|
Resolución de 12 bits, entrada de voltaje analógica de 0-5V, 3 botones de presión y 3 LED, interruptor de parada de emergencia incluido, mando de ajuste de velocidad incluido (usado mutuamente con el botón 3 #)
|
|
| 28 |
Tarjeta de control de iluminación incorporada
|
Luz de superficie de 8 secciones + luz de fondo + luz coaxial, ajuste de software de nivel 0-200
|
|
| 29 |
Función de ajuste del grado de iluminación
|
Ajuste de hardware de 16 niveles en la base de configuración de parámetros según el requisito de brillo
|
|
| 30 |
capacidad de control de la luz de contorno / control del banco LED
|
Max. 420mA, adecuado para la mayoría de las máquinas de viaje grandes
|
|
| 31 |
Interfaz de iluminación externa de tipo complicado
|
Capaz de conectarse a 5 anillos de luz programable de 8 secciones de un solo color, o 5 anillos de luz programable de 8 secciones de 4 colores, luz elevada / rotable
|
|
| 32 |
Interfaz de E/S general
|
Entrada aislada de 8 secciones, salida 5 (compatible con ULN2803)
|
|
| 33 |
Reloj del sistema
|
Año-mes-día-hora-minuto-segundo, no puede modificarse
|
|
| 34 |
Actualización del firmware
|
Actualización del cliente en el sitio, ofreciendo una solución rápida y una actualización técnica.
|
|
| 35 |
Conector de la sonda
|
Conector D-DUB de 9 pines, más fácil de cablear y más estable
|
|
| 36 |
Conector del joystick
|
OTP6, OTP7, HC3 ((Joystick con varias teclas)
|
|
| 37 |
Procesamiento de datos del joystick
|
El controlador procesa internamente los datos del joystick y el control de movimiento, mutuo con el otro modo de control de movimiento, la sonda del joystick tocando con parada automática y retirada automática
|
|
| 38 |
Parada de emergencia externa
|
El botón de parada de emergencia controla la fuente de alimentación del motor
|
|
| 39 |
Planificación de la curva de velocidad
|
Tipo de escalera / S
|
|
| 40 |
Interruptor de límite de software
|
Disponible
|
|
| 41 |
Punto de desaceleración del software
|
Disponible
|
|
| 42 |
Distancia de frenado designada
|
Disponible
|
|
| 43 |
Software de depuración compatible
|
Versión V4.0 o superior (parámetro de detección y ajuste automáticos)
|
|

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!